

RonWang Administrator
No introduction yet
515 articles 9 commentsUHP | Hose assemblies up to 4000bar

Production of ultra high pressure (UHP) hose assemblies up to 4000 barAutaba offer UHP assembly serv…
NASA's Parker Solar Probe mapped an unseen part of the sun at its most active moment
Data from NASA's Parker Solar Probe has enabled astronomers to map the unssen surface of the sun…
Japan trials 100-kilowatt laser weapon — it can cut through metal and drones mid-flight

Japan has deployed a system that fires laser beams with 100 kilowatts of energy — powerful enough to…
How Can You Diagnose a Hydraulic Pump Problem?

In order to effectively diagnose a hydraulic pump problem, there should be a systematic approach tha…
Car Induction Wireless Charging System Market (2026 - 2033)
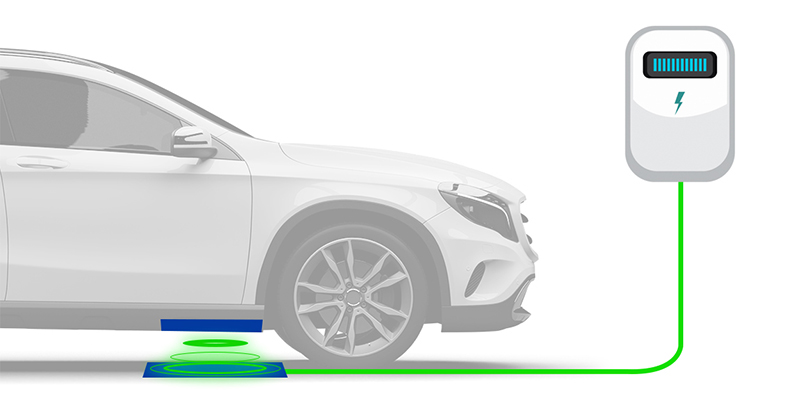
Car Induction Wireless Charging System Market OverviewThe global Car Induction Wireless Charging Sys…
UHP | Competitive Strategy Analysis for Entering the U.S. Ultra‑High‑Pressure (UHP) Market

The Ultra‑High‑Pressure (UHP) fluid connection market — encompassing hoses, fittings, and related sy…
UHP | Waterjet Companies in Los Angeles / Long Beach

The UHP waterjet industry in Los Angeles and Long Beach is significantly larger and more active than…
H2 | Hydrogen Marketing Analysis

洛杉矶是美国氢能产业链最成熟的地区之一,高压氢气管路(350–700 bar)相关的商业化服务已经形成完整生态:加氢站建设与运维、车载储氢系统集成、氢气供应链、氢气运输、压缩与储存系统、检测与认证服务…
HV | HV Cold-chain Engineer

If engineer want entry as HV cold-Chain engineer. The article give you a structured it into three ph…
HV | SAE International introducation

SAE International is a global professional association and standards organization dedicated to advan…