









 </p
</pRelated Articles

UHP | Maritime Technology Trends Defining 2026 and Beyond
In 2026, the maritime industry is being transformed by autonomous ships, AI-driven operations, digit…

ASTM Rubber Material Standard
ASTM's rubber standards are instrumental in specifying, testing, and assessing the physical, mec…
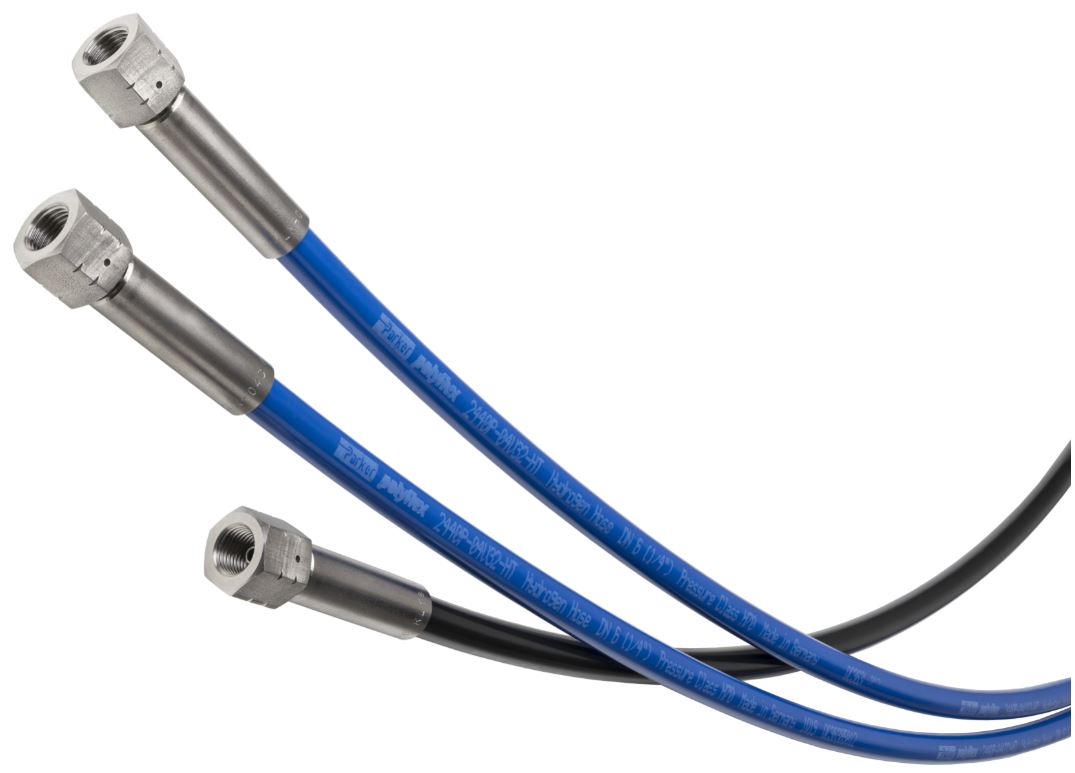
Parker Polyflex 2440P-04V32 HT-P Hydrogen Hose
Hannover Messe 2019; 1 - 5 April; Hannover Fairground; IAMD, Hall 23, Booth C33; ComVac, H…
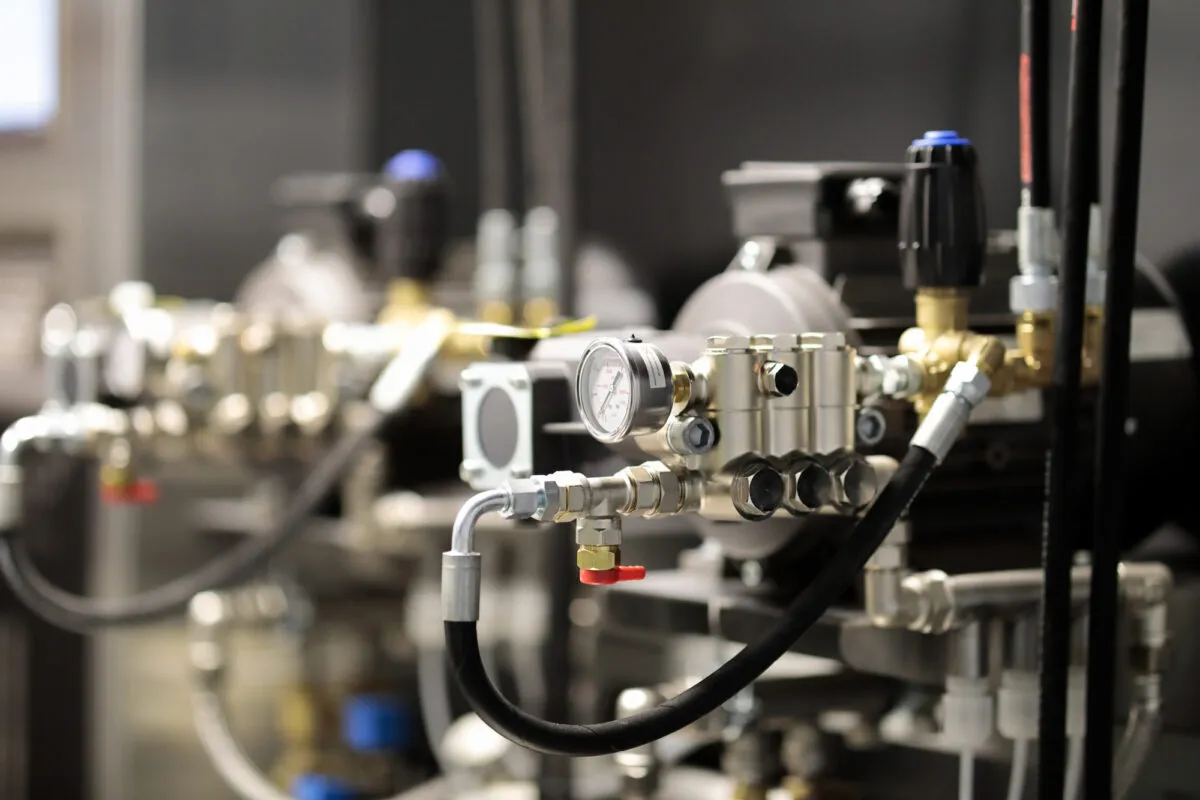
UHP | Ultra-High-Pressure Fluid Connection :Equipment Evaluation List 04
本文将进一步细化高压软管加工中心的设备清单及资金预算分析,主要包括:核心设备 / 辅助设备 / 安全设施 / 办公与 IT / 未来扩展设备 五大类,并给出 2026 年美国市场真实价格区间。用户可以…
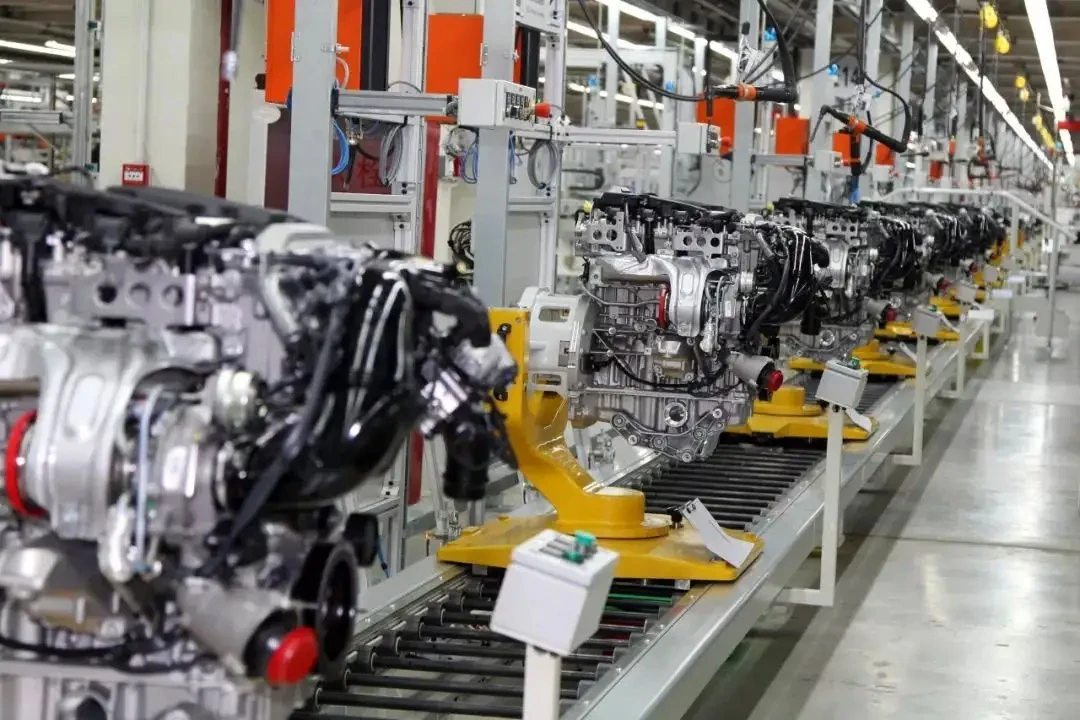
Mercedes-Benz Factory Project Renovation - VEXROTH Technology Innovation
2021年奔驰C大换代,在北京奔驰的发动机生产线也对新C的生产进行了生产线的改造和调整,在原M270和M276的基础上增加了新M254四缸发动机,M254发动机生产线的技术改造项目总投资20.85亿元…

UHP | Competitive Strategy Analysis for Entering the U.S. Ultra‑High‑Pressure (UHP) Market
The Ultra‑High‑Pressure (UHP) fluid connection market — encompassing hoses, fittings, and related sy…
Post a Comment
