HOME
RESEARCH
INDUSTRY
CODING
DRONE
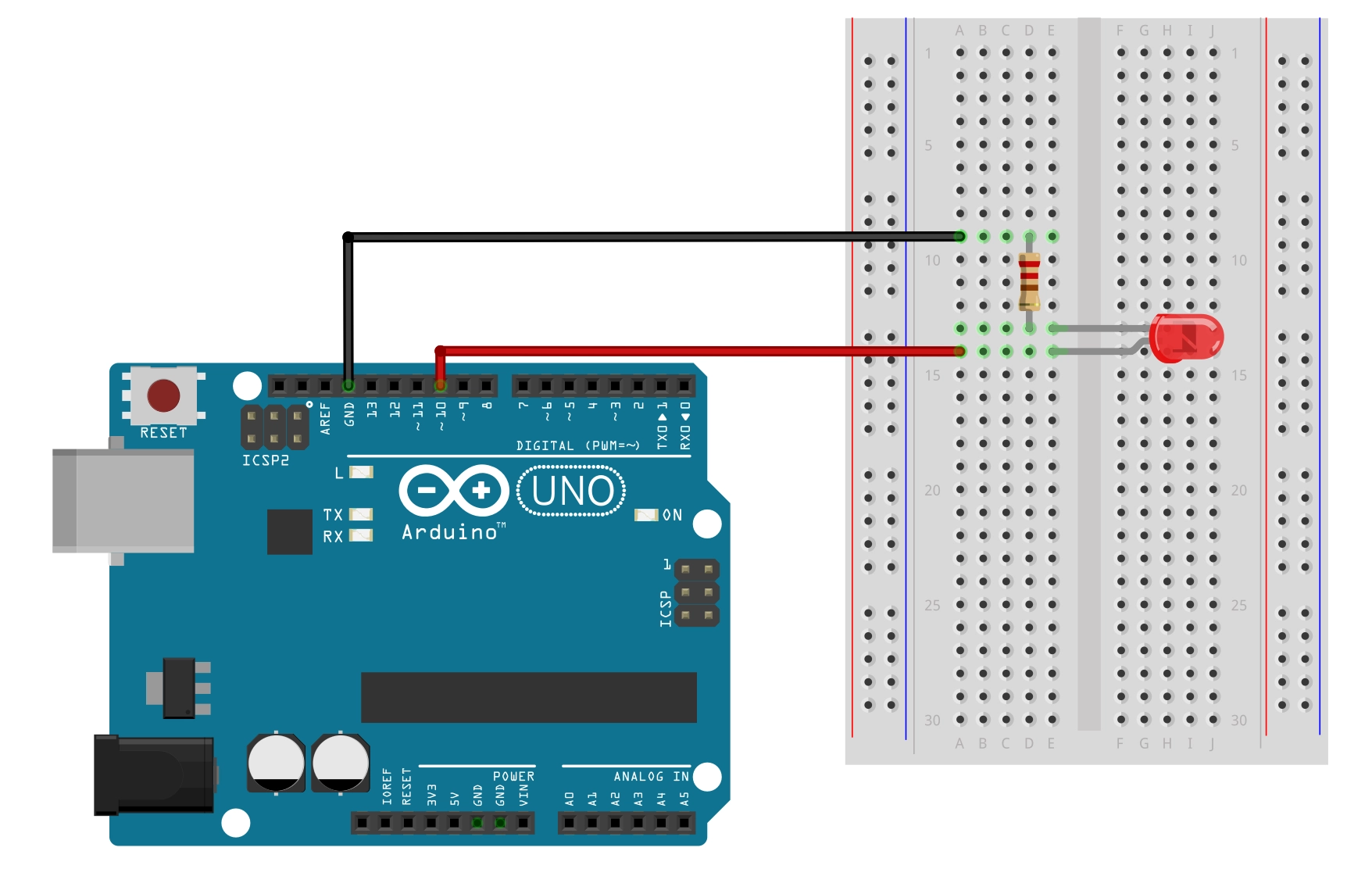
CODE | Variables - Arduino Programming Basic
RonWang
4 years ago
(2022-06-22)
142
Arduino 程序基础,介绍Arduino程序的基本组成,第一部分编写了10个例子,关于变量及变量名称,串口监视器,if循环,for循环,while循环等。第二部分介绍了函数,全局变量,局部变量和静…
Read More
«
June , 2022
»
Mon
Tue
Wed
Thu
Fri
Sat
Sun
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
Comments
对于DIY模友非常有帮助……
Looking forward to it
Advanced H2 Storage
Robots as a Service gains traction
Humanoids stay in the spotlight, but real deployments remain limited
The Robot application
2026 Winter Storm Soo Cold
CES 2026 Robot and AI trend
IR remote project very useful and I success use the coding
Catalog
科学研究 SCI
工业技术 INDS
电子编程 COD
航空航模 AERO
美丽人生 LIFE
陪伴成长 ACCO
Tags
机器人
(7)
人工智能
(2)
无人机
(6)
氢能源
(16)
超高压
(1)
Vehicle
(0)
流体技术
(13)
自动化
(11)
管路技术
(3)
HV System
(6)
流体分析
(1)
市场分析
(9)
有限元分析
(0)
Arduino
(5)
Plumbing
(21)
USCPA
(2)
Brands
Autaba
Autaba EShop
Paker Hannifin
Danfoss
Gates
UNIFLEX
Finnpower
O+P
UltraClean
ADDITEL
Dashboard
Howdy, Autaba RC!
Admin Log
Permit